Merhaba, siparis no : 201365458354
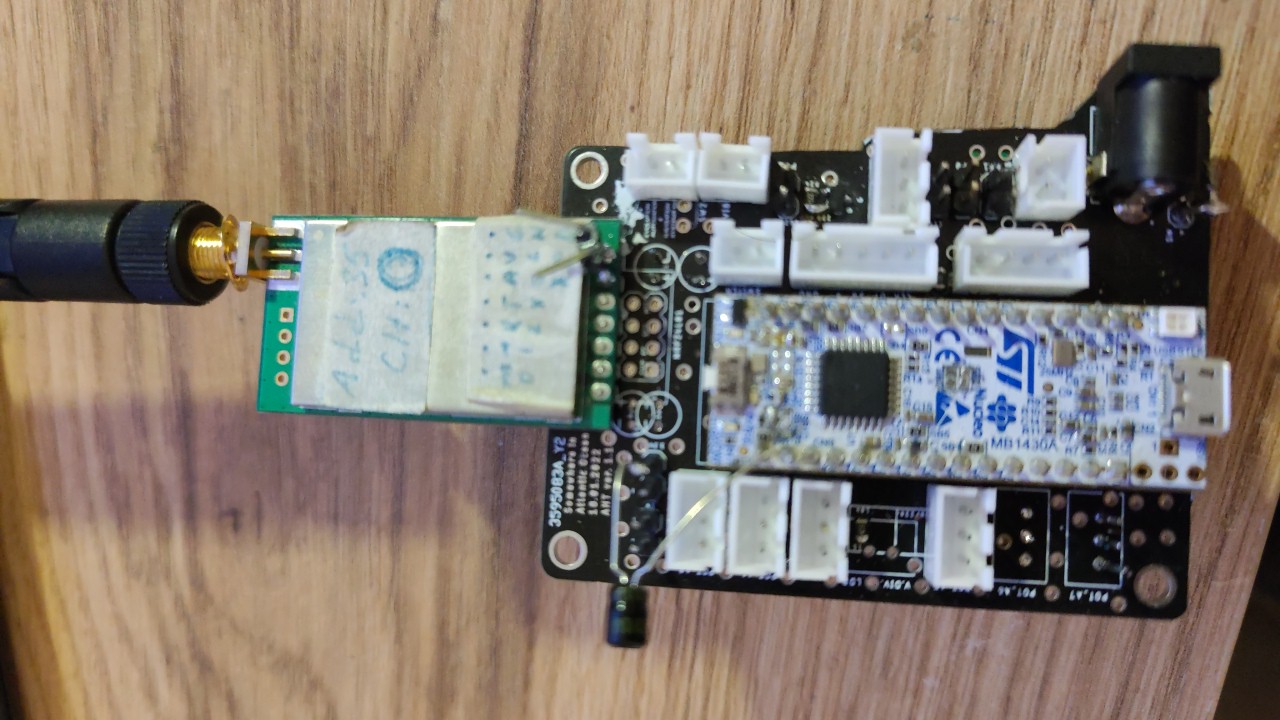
Lora e 32 433T30D modeli ve stm32(nucleo g431kb) ile uzaktan kumanda devresi yaptim. Aybi pcb uzerine lehimliler. GND ler ortak.
Potansiyometreden okudugum analog veriyi karsiya yollayabiliyorum. Ama ne zaman 4db anten ile gondermeye baslasam analog degerler +-100 deger degisiyor. Anteni soktugumde bu sorun olmadan gondermeye devam edebiliyorum.
Denedigim seyler,
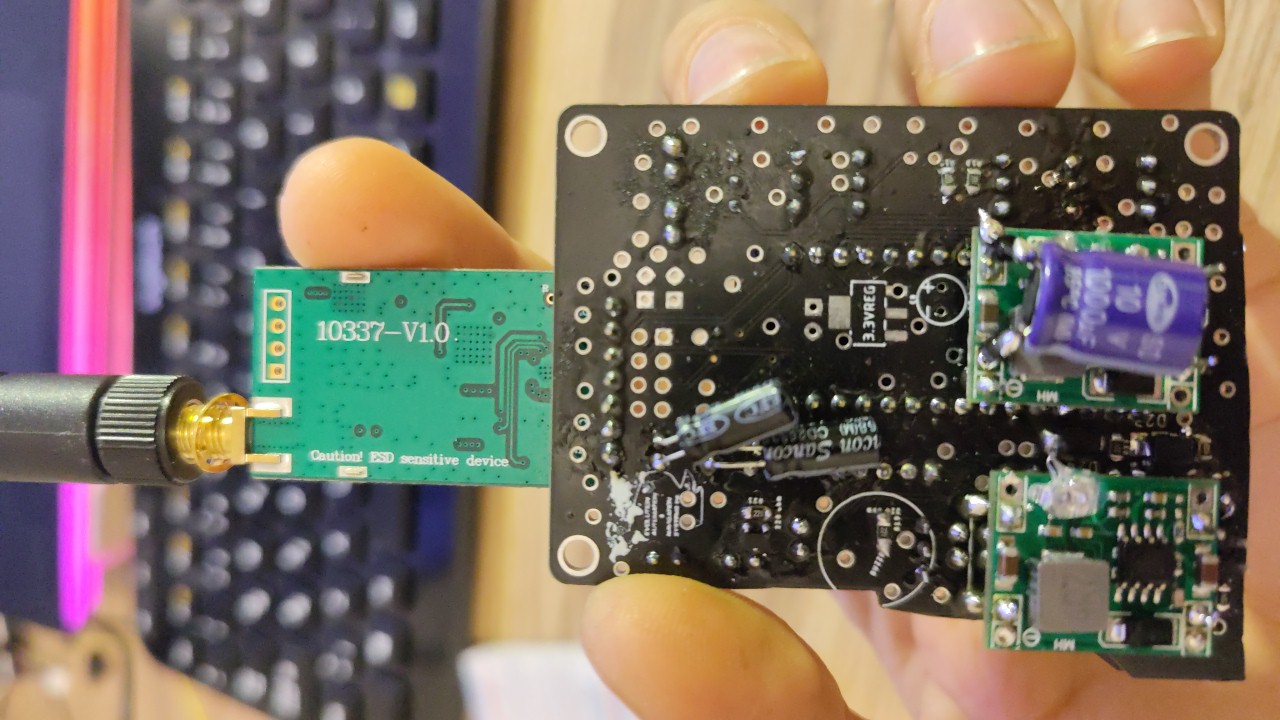
1-Anten ile kontrolcunun beslemesini ayirmak.
2-Anten girisine 10 ve 0.1 uf guc kaynagi cikisina 1000 uf kapasitor koymak.
3-Antenin etrafina once gazete(kisa devre olmasini engellemek icin) ardindan uzerine aluminyum folyo kapladim.
Aklima baska bisey gelmedi. Bir fikriniz var mi?
acaba çok mu yakın birde kullandığın kodu görelim
son durum ne hocam çözüldü mü olay. Sırf senin için mart ayında stm32 ile lora serisine başlıyorum hemde 2 farklı kanalda (biri ingilizce)
birde boud rate 115200 sanki kodda, acaba lora da öylemi. default da 9600 yapılır.
loralar ve kontrolcüler 115200.
evet hepsi 115200.
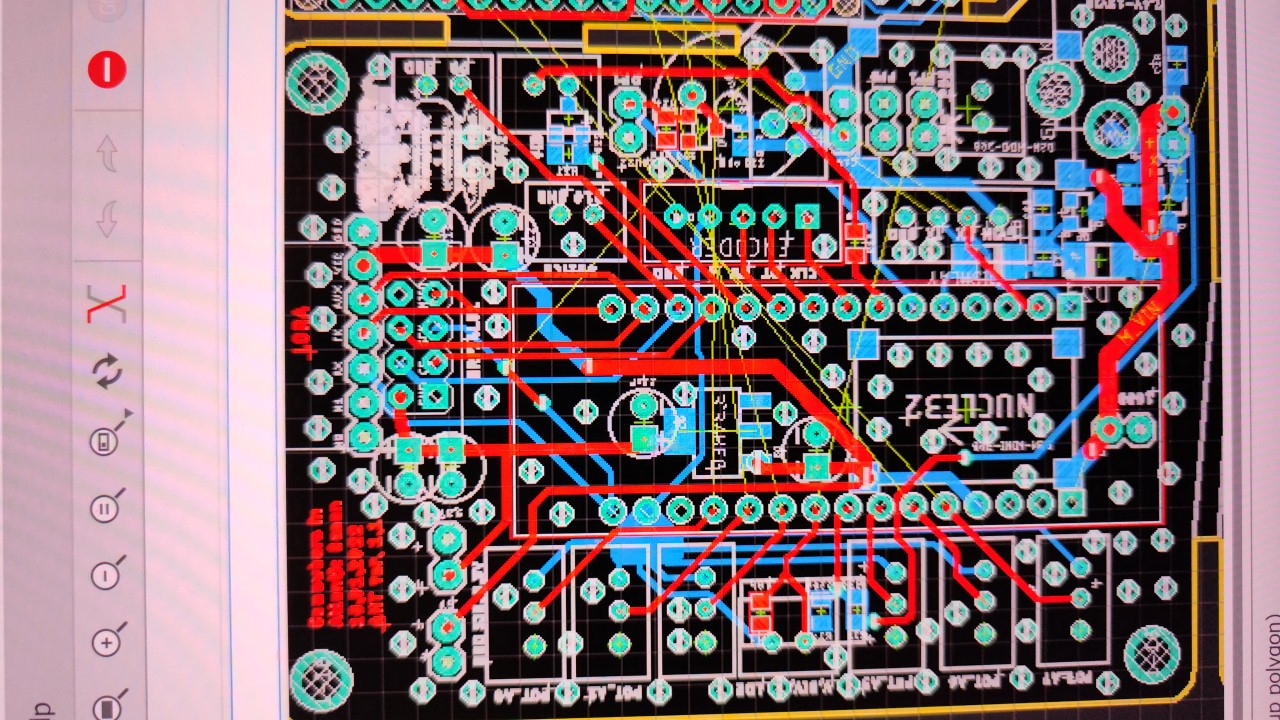
JLCPCB den yaptirdim.
Merhaba, ayni konumda arduino ve jumperlarla yaptigim testte goyle bir gurultu olmadi. Sanirim sorun mesafe degil benim pcb tasarimim. Biseyleri gozden kacirmis olmaliyim.
Kodlar asagidaki gibi.
Gonderici kodu;
#include "include.h"
HardwareSerial Serial1(D12, D13);
//AUX
LoRa_E32 e32ttl(&Serial1, D11, UART_BPS_RATE_115200);
potentiometers pots;
Smooth smooth;
// variables for smoothing pot val.
int smoothedPotVal;
int ewmaSmooth;
struct dataSend
{
int potLefty;
}dataToSend;
void send()
{
dataToSend.potLefty = smoothedPotVal;
ResponseStatus rs = e32ttl.sendFixedMessage(0, 17, 0, &dataToSend, sizeof(dataSend));
}
void setup()
{
Serial1.setRx(PB_4); // setrx of nucleo board
Serial1.setTx(PB_3); /// setrx of nucleo board
e32ttl.begin();
Serial.begin(115200);
}
void loop()
{
pots.readPots(); // Read pot values
ewmaSmooth = smooth.filter(pots.leftYRaw, 1, 2); // smooth for moving average of 0.1
smoothedPotVal = (0.90 * smoothedPotVal) + (0.10 * ewmaSmooth); // additional low pass filter
send(); // send struct.
Serial.println(smoothedPotVal);//print what we send
//delay(250);
}
Alici kodu ;
Adafruit_PWMServoDriver myServo = Adafruit_PWMServoDriver(); // servo driver
#define SERVOMIN 100
#define SERVOMAX 600
HardwareSerial Serial1(D17, D74);
LoRa_E32 e32ttl(&Serial1, PB2, UART_BPS_RATE_115200);
struct Message
{
int potLefty;
};
Message message;
int potValue;
void receive()
{
if (e32ttl.available() > 1)
{
ResponseStructContainer rsc = e32ttl.receiveMessage(sizeof(Message));
message = *(Message *)rsc.data;
Serial.println(message.potLefty); // print incoming pot val
myServo.setPWM(0, 0, message.potLefty); // aplly to servo
rsc.close();
}
}
void setup()
{
Serial1.setRx(PB_15); // using pin name PY_n
Serial1.setTx(PB_14); // using pin number PYn
e32ttl.begin();
myServo.begin();
myServo.setPWMFreq(50); // Analog servos run at ~50 Hz updates
Serial.begin(115200);
delay(100);
}
void loop()
{
receive();
}
evet alıcı – verici Loralar 115200. Alıcı ve verici gücünü minimuma alıp, veri transfer hızını arttırıp, FEC i de aktih ettim her iki uçta. Gürültü kontrol edilerbilir seviyeye indi . Ama max mesafe için kullanamayacağım malesef.