2 istasyon şeklinde 20 d modeliyle veri alıp gönderebiliyorum hiçbir sorun yok. Ancak arduino nano her veri gönderdiğinde , kendisine bağlı olan servo motoru hareket ettiriyor. Tüm pinleri denedim aynı sonucu verdi.
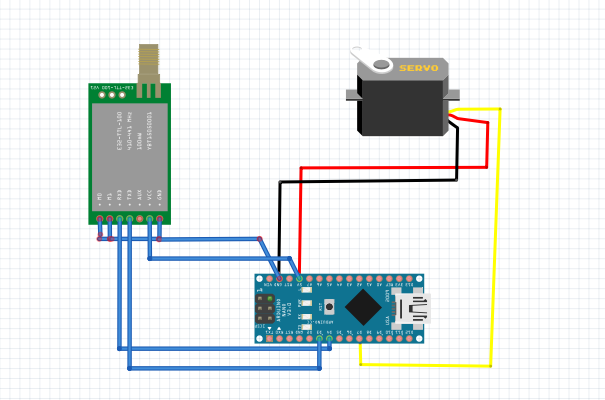
Bağlantı şu şekilde = > Arduino nano – Servo motor(digital pins) besleme dışarıdan 5v – Lora 20d besleme nano’dan 5v.
Araştırdığım forum sitelerinde genelde 2 istemcinin de aynı kütüphaneyi kullanabileceğinden veya nano’nun veri gönderirken pwm pinine yanlış frekans göndermesinden kaynaklı olabilir denmiş, ancak servoyu pwm pininde dahi kullanmazken aynı sonucu alıyorum.
Sizce bu sorunu nasıl çözebilirim ? Zamanınız için teşekkür ederim.
Soru yeni cevaplara kapalıdır.
Mehmet En iyi cevap olarak seçildi Haziran 4, 2021
#include "LoRa_E32.h"
#include <SoftwareSerial.h>
#include<Servo.h>
Servo servo1;
SoftwareSerial mySerial( 3 , 4 );
/*
Pinler Arduino Nano Lora E32 433T20d
*/
LoRa_E32 e32ttl( & mySerial);
struct Signal {
char type[ 15 ] = "Trying" ;
byte temp[ 4 ];
} data;
void setup () {
Serial.begin ( 9600 );
e32ttl.begin();
delay ( 500 );
servo1.attach(7);
}
void loop () {
ResponseStatus rs = e32ttl.sendFixedMessage( 0 , 44 , 23 , & data, sizeof (Signal));
Serial.println (rs.getResponseDescription());
delay ( 2000 );
}
Mehmet Yeni yorum gönderildi Mayıs 30, 2021
şu an yanımda servo yok. pazartesi aynı kodu çalıştırıp bakayım.